|
Multilateral Manipulation by Human-Robot Collaborative Systems
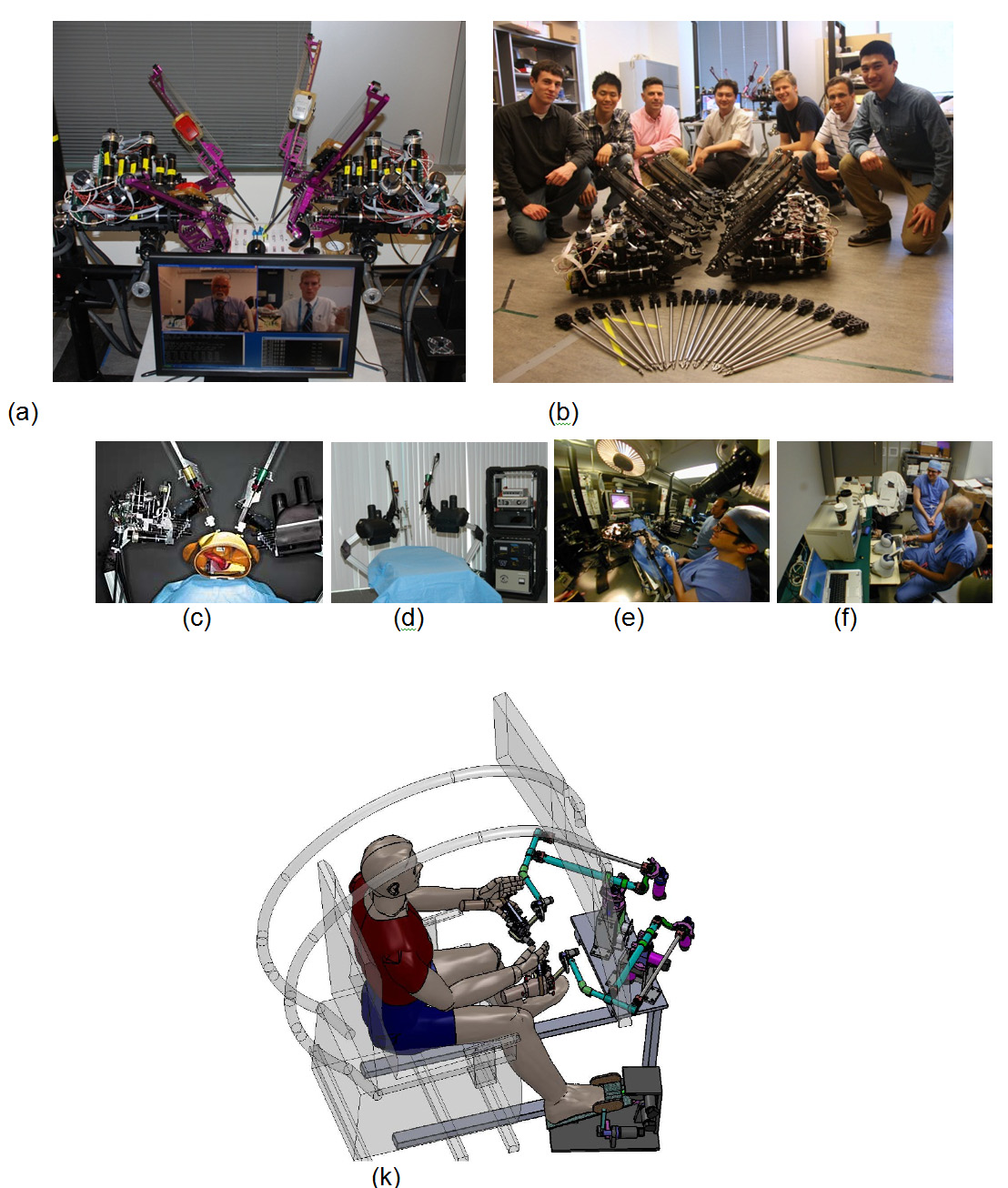
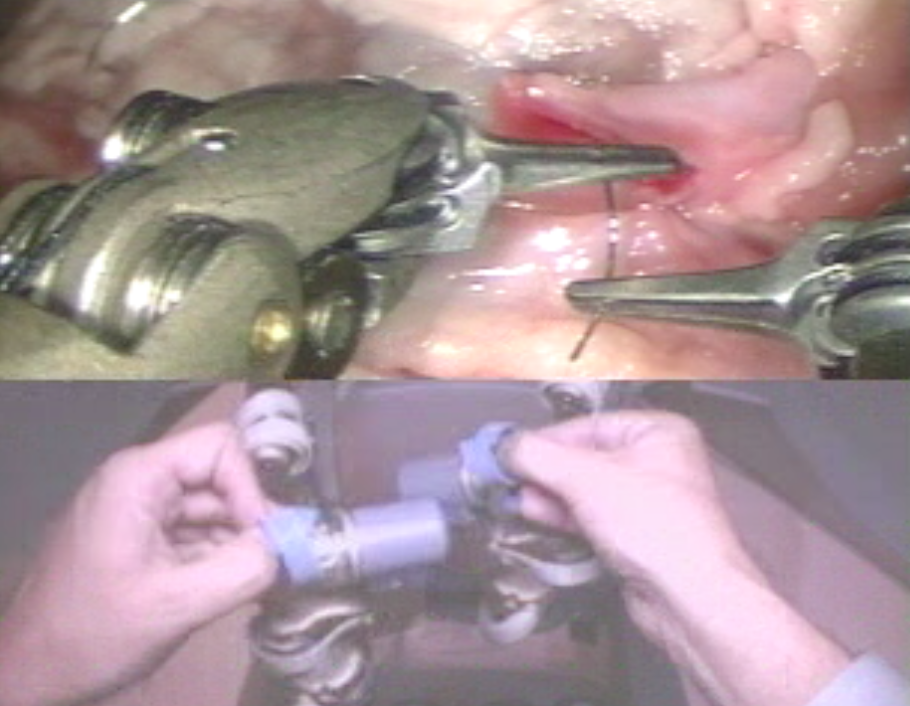
Allison Okamura, Stanford University Summary: This 4-year multi-campus research project seeks to emulate the expert-apprentice relationship using human beings and robots. It focuses on developing ways in which robots can learn from human activity in order to help humans by providing extra hands, eyes and brain power as necessary, enabling multilateral manipulation from multiple vantage points. The range of applications includes manufacturing and surgery. Overview: This project addresses a large space of manipulation problems that are repetitive, injury-causing, or dangerous for humans to perform, yet are currently impossible to reliably achieve with purely autonomous robots. These problems generally require dexterity, complex perception, and complex physical interaction. We conjecture that many such problems can be reliably addressed with human-robot collaborative (HRC) systems, where one or more humans provide needed perception and adaptability, working with one or more r obot systems that provide speed, precision, accuracy, and dexterity at an appropriate scale, within a generalizable system framework that synergistically combines these complementary capabilities. The project focuses on multilateral manipulation, which arises when a human controls one or more robot manipulators in partnership with one or more additional controllers (humans or autonomous agents). Complex operations in surgery and manufacturing can benefit from the extra degrees of freedom provided by more than two hands, and training often depends on hands- on interaction between expert and apprentice. Example applications include surgical operations, which typically involve several physicians and assistants, and other medical tasks such as turning a patient in bed and wrapping a cast to constrain a hand. Mult ilateral manipulation also applies in manufacturing, for example for threading wires or cables, aligning gaskets to obtain a tight seal, and in many household situations, such as folding tablecloths, wrapping packages, and zipping overfilled suitcases. Multilateral manipulation often arises with deformable materials or multi-jointed objects with more than six degrees of freedom (DOF). The extra DOFs in material s introduce challenges such as computational complexity, but can be viewed as an advantage, as they can accommodate minor inconsistencies through redundancy and provide system damping. This project advances the fundamental science of multilateral manipulation guided by specific applications from surgery and manufacturing. Intellectual Merit: This project investigates the foundations of human-robot systems and the scientific issues that arise in the context of multilateral manipulation. The project will develop new algorithmic tools for modeling, simulating, designing, and monitoring multilateral manipula- tion systems, which requires advances in high-dimensional modeling, sampling, and planning with deformable materials. This project will advance understanding of low-level operational issues such as measures of stability, safety, and usability together with high-level issues such as communicating intent and recognizing si gnificant transitions in system status. This project builds on emerging advances in computing, open-source software, and robot learning from human demonstrations . This project takes advantage of the RAVEN II, an NSF-funded open-source hardware platform, which will be installed at all institutions involved in the project. The investigators have previously collaborated effectively on projects related to medical robotics, control, modeling, and motion planning. Broader Impacts: Multilateral manipulation systems have the potential to improve healthcare, improve American competitiveness and product quality in manufacturing, and open the door to new service robot applications in the home. The project will be guide d by an Advisory Board of experts from industry and medical practice. Project results will be disseminated through yearly conference workshops, open-source softw are tools integrated into common robotics software environments such as Robot Operating System (ROS), and the investigators' research and course webpages, to enc ourage integration of our approach into research projects and courses at many institutions. Outreach programs, public lab tours, and mentoring of minority students will broaden participation of underrepresented groups in engineering. These activities will encourage participation in STEM activities and provide student and postdoctoral researchers with mentoring experience. Links:
 |
{kind=link}