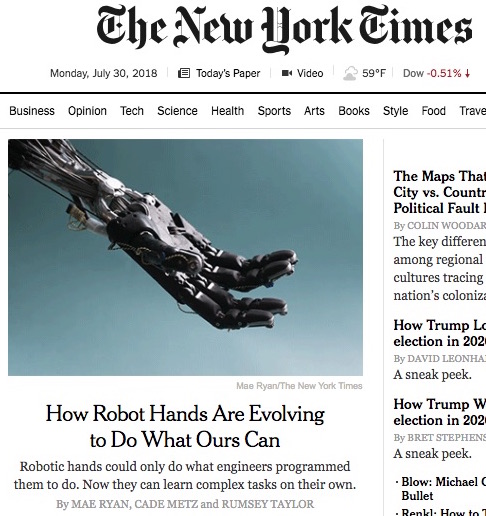
Shake Hands with the FutureA July 2018 New York Times feature story about the state of the art in robot grasping by Mae Ryan, Cade Metz, and Rumsey Taylor.
In the article and stylized videos,
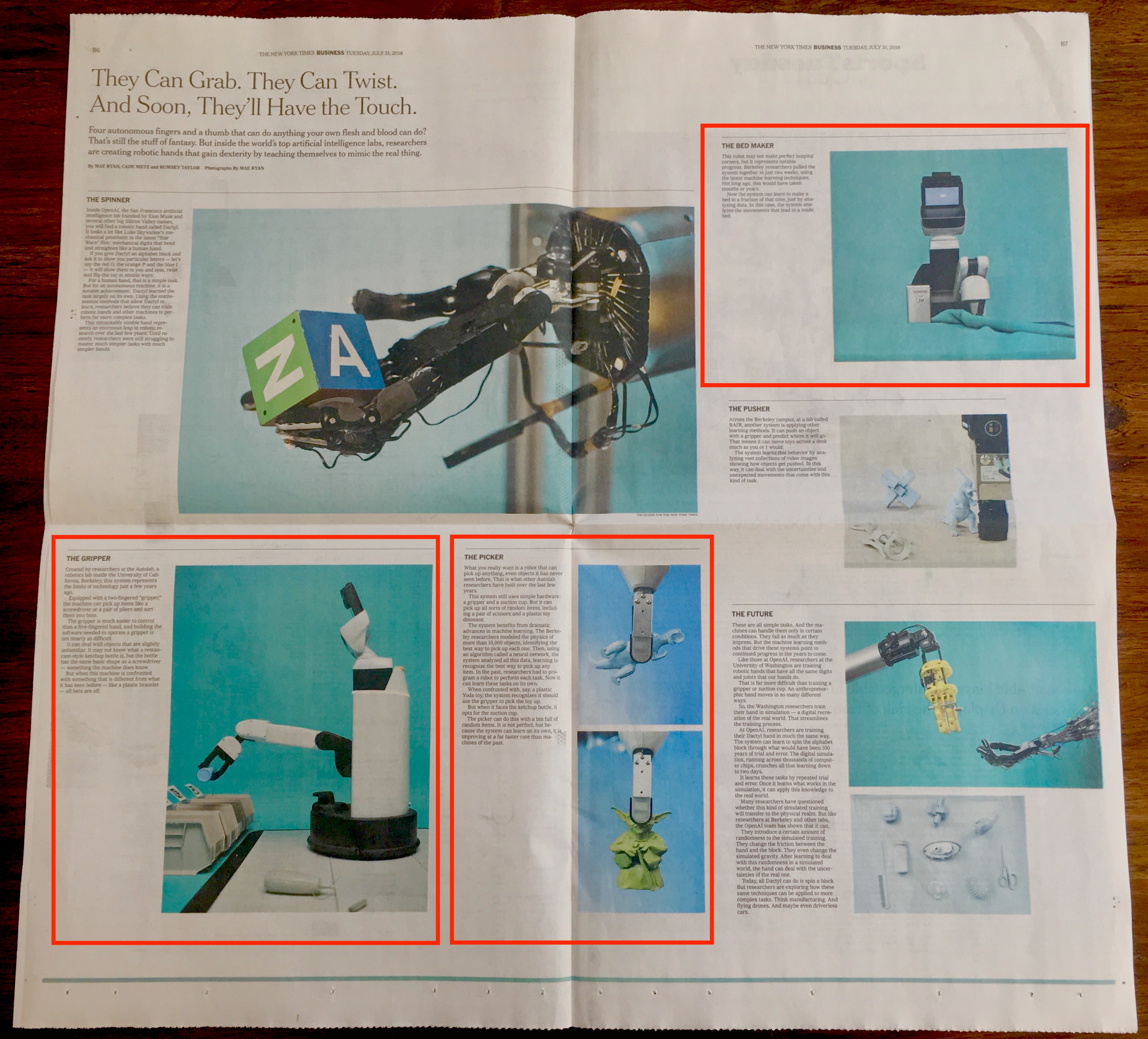
3 of the 6 grasping projects (red boxes below) describe ongoing research
in the UC Berkeley AUTOLab
including "...What you really want is a robot that can pick up anything, even stuff it has never seen before. That is what AUTOLab researchers have built over the last few years... The system benefits from dramatic advances in machine learning. The Berkeley researchers modeled the physics of more than 10,000 objects, identifying the best way to pick up each one. Then, using an algorithm called a neural network, the system analyzed all this data, learning to recognize the best way to pick up any item. In the past, researchers had to program a robot to perform each task. Now it can learn these tasks on its own."
NY Times Website, 30 July 2018
Business Section, page B1, 31 July 2018
Business Section, page B6-7, 31 July 2018
Universal Picking with the
Dexterity Network (Dex-Net)>.
An investigation that combines analytics, stochastics, and deep learning for Universal Picking of previously unseen objects from bins,
involving AUTOLab PhD students Jeff Mahler, Matt Matl, Bill DeRose, David Gealy, Steve McKinley, Mike Danielczuk, and Ashwin Balakrishna.
SCHooL: Scalable Collaborative Human-Robot Learning.
An ongoing National Science Foundation research project on robot learning with
"surface decluttering" as an integrated application.
A Berkeley AI Research (BAIR) project involving Profs.
Anca Dragan, Pieter Abbeel, Stuart Russell, postdocs Ajay
Tanwani, Aviv Tamar, Roy Fox, Ron Berenstein, and PhD students Dylan
Hadfield-Menell, Sanjay Krishnan, and Rena Dorph and Jacqueline Barber
from the Lawrence Hall of Science.
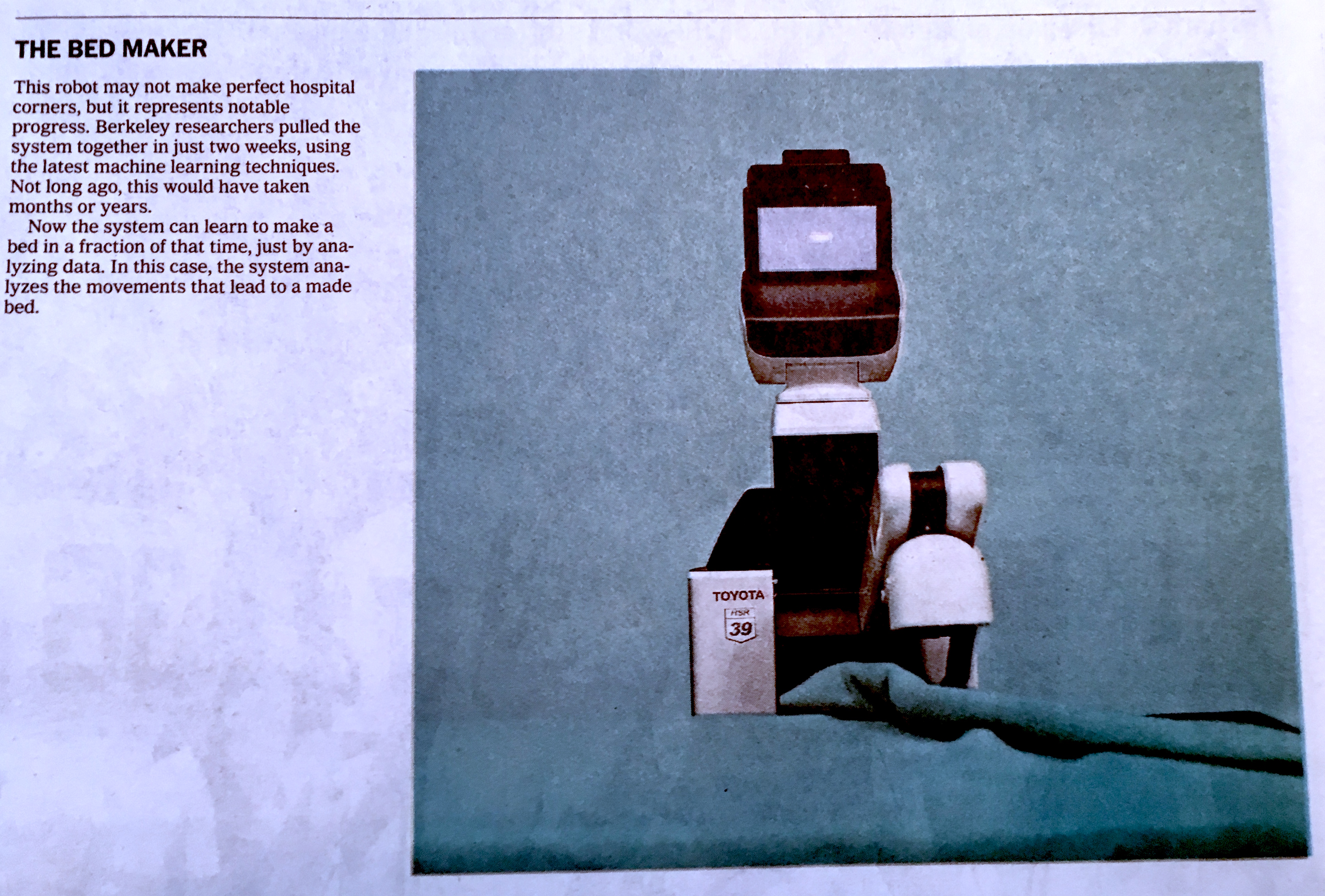
Robot Bed Making (paper in preparation, stay tuned!)
A research project involving AUTOLab PhD students Michael Laskey and Daniel Seita, postdocs
Ron Berenstein and Ajay Tanwani, Honda researchers
Soshi Iba, Nawid Jamali, and Prakash Baskaran, and colleagues
from the Toyota Research Institute (TRI).
Berkeley AI Research (BAIR) Lab This research was performed at UC Berkeley's AUTOLAB in affiliation with the Berkeley AI Research (BAIR) Lab, Berkeley Deep Drive (BDD), the Real-Time Intelligent Secure Execution (RISE) Lab, and the CITRIS "People and Robots" (CPAR) Initiative, supported in part by donations from Siemens, Google, Amazon Robotics, Toyota Research Institute, Autodesk, ABB, Samsung, Knapp, Loccioni, Honda, Intel, Comcast, Cisco, Hewlett-Packard and by equipment grants from PhotoNeo, NVidia, and Intuitive Surgical.
|