Self-Aligning Robot Gripper Jaw Design<August, 1999 ~ August, 2001> ALPHA Lab, University of California, Berkeley.
Note: For better performance of the Java applet
and the movies, please use Internet Explorer
NOT
Netscape.
Abstract:Assembly lines often require grippers. It is possible in many cases to compensate for the difference in part orientation using a parallel-jaw gripper with appropriate jaw design. The idea is to arrange contacts on each gripper jaw so that the part is aligned as it is grasped and yet cannot jam.
We consider jaws based on a set of trapezoidal jaw modules that maximize contact between the gripper and the part at its desired final orientation. Furthermore, jaws are constrained to capture and rotate the part to its desired orientation and achieve a form-closure grasp. Given the n-sided 2D convex projection of an extruded polygonal part, we present an implemented O(n3 log n) algorithm to efficiently construct optimal jaw design. The algorithm combines toppling, jamming, non-liftoff, accessibility, and form-closure analysis. We also develop an O(n log n) algorithm to find a tolerance class for jaws (specified as maximum and minimum material conditions) given the optimal jaw design.
We introduce new geometric functions and a new data structure,
the toppling graph, to represent the mechanical and geometric properties
of jaw design. We implemented our jaw design algorithm in Java and the
resulting jaw designs were verified by physical experiments.
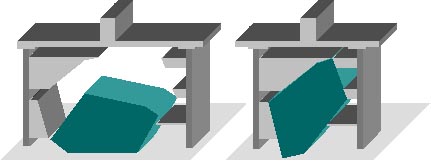
Introduction:Grippers can be the most design-intensive components of an assembly system. Although grippers are widely used for automated manufacturing, assembly, and packing, the design of gripper jaws is usually ad-hoc and can be a major limiting factor in automated assembly.The part is initially in the resting pose. It is necessary to rotate
the part to the desired final orientation for assembly. The idea is to
design the gripper jaws so as to align the part as it is acquired. We divide
the grasp into three phases: pushing, toppling and fixturing. Initially,
one jaw makes contact with the part (the pushing contact). The jaw pushes
the part along the work-surface until the part makes contact with the toppling
contact on the second jaw. At this point the part begins to rotate
(topple) from its initial orientation to the desired orientation. During
toppling, the part is constrained by two contacts and the surface. When
the part reaches its final fixtured orientation other jaw surfaces stop
its motion. The optimal jaw design guides the part through these
phases, avoids premature toppling, jamming, and liftoff, and fixtures the
part in form closure with maximal linear contact.
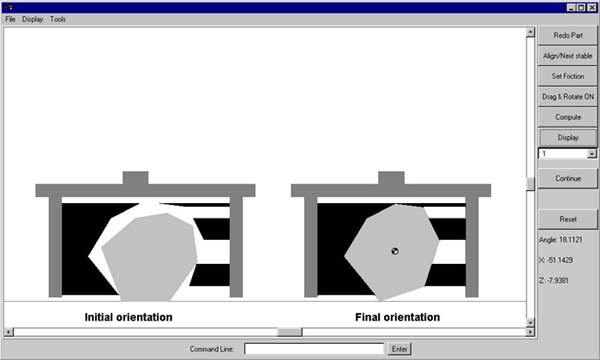
Java Implementation:We implemented our jaw design algorithm in Java. Users can draw parts, define the COM and the friction coefficients, chose the initial and the final orientations; the applet computes, ranks, and displays the resulting gripper jaw design (Click the image below to try the applet).
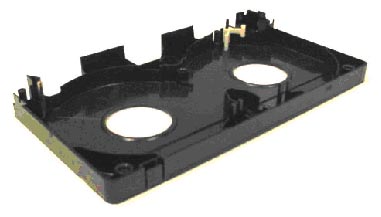
Experiments:We also conducted a physical experiment using an AdeptOne industrial robot and a pneumatic parallel-jaw gripper (Mecanotron serial number: 101167) with jaws we designed. We added two air regulators (Wilkerson serial number: R08-01-F000) to adjust air pressure for the gripper, and also used utility compression spring (Century serial number: C-606) to slow down the gripper motion.The first experiment we conducted was to design four-contact jaws for a small lever from a standard videotape (Fuji serial number: 7410161160). Its natural resting pose is as follows:
We have to insert a peg, which is on the video tape case, into the hole
of the part for assembly (see the figure below). Therefore, rotation of
the part in the vertical plane is required.
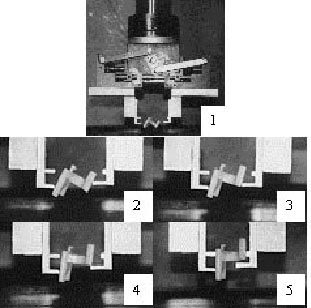
We conducted a successful experiment in sequence 1~5 for 50 trials (Click
the image below to see a movie, 5M).
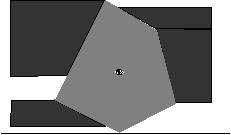
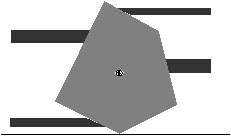
In the second experiment, we verified both optimal jaw design and the
jaw design with minimal linear contacts between the part and the jaws (Click
the images below to see movies).
Publications:
Media Coverage:
Acknowledge:
|